網站:bbs.21ic.com

 ?
? 

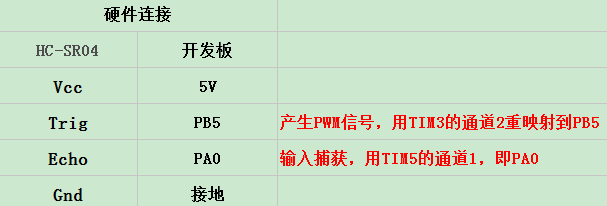
2.要掌握的知識點和設備
3.代碼編寫,代碼是參考的正點原子的PWM輸出和輸入捕獲,因為項目原理上面說過了,基本就是這兩個功能的疊加。我本來想用HAL庫來做,但是CUBEMX生成的代碼調試沒成功,所以最后還是用的原子的標準庫來做的。下面代碼截取的是main.c和time.c。也是這個項目里面最重要的兩個部分。
extern u8 TIM5CH1_CAPTURE_STA; //輸入捕獲狀態extern u16 TIM5CH1_CAPTURE_VAL; //輸入捕獲值int main(void){u32 temp=0;double ss=0;delay_init(); //延時函數初始化NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2); //設置NVIC中斷分組2:2位搶占優先級,2位響應優先級uart_init(115200); //串口初始化為115200TIM3_PWM_Init(71,199); //不分頻。PWM頻率=72000/(899+1)=80KhzTIM5_Cap_Init(0XFFFF,72-1); //以1Mhz的頻率計數while(1){delay_ms(10);// TIM_SetCompare2(TIM3,TIM_GetCapture2(TIM3)+1);TIM_SetCompare2(TIM3,63);if(TIM_GetCapture2(TIM3)==300)TIM_SetCompare2(TIM3,0);if(TIM5CH1_CAPTURE_STA&0X80)//成功捕獲到了一次上升沿{temp=TIM5CH1_CAPTURE_STA&0X3F;temp*=65536;//溢出時間總和temp+=TIM5CH1_CAPTURE_VAL;//得到總的高電平時間ss=temp*340/2/1000;printf("高電平時間:%d us\r\n",temp);//打印總的高點平時間printf("測試距離為:%3.0f mm\r\n",ss);TIM5CH1_CAPTURE_STA=0;//開啟下一次捕獲delay_ms(500);}}}
void TIM3_Int_Init(u16 arr,u16 psc){TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;NVIC_InitTypeDef NVIC_InitStructure;RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE); //時鐘使能TIM_TimeBaseStructure.TIM_Period = arr; //設置在下一個更新事件裝入活動的自動重裝載寄存器周期的值 計數到5000為500msTIM_TimeBaseStructure.TIM_Prescaler =psc; //設置用來作為TIMx時鐘頻率除數的預分頻值 10Khz的計數頻率TIM_TimeBaseStructure.TIM_ClockDivision = 0; //設置時鐘分割:TDTS = Tck_timTIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上計數模式TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); //根據TIM_TimeBaseInitStruct中指定的參數初始化TIMx的時間基數單位TIM_ITConfig( //使能或者失能指定的TIM中斷TIM3, //TIM2TIM_IT_Update | //TIM 中斷源TIM_IT_Trigger, //TIM 觸發中斷源ENABLE //使能);NVIC_InitStructure.NVIC_IRQChannel = TIM3_IRQn; //TIM3中斷NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; //先占優先級0級NVIC_InitStructure.NVIC_IRQChannelSubPriority = 3; //從優先級3級NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道被使能NVIC_Init(&NVIC_InitStructure); //根據NVIC_InitStruct中指定的參數初始化外設NVIC寄存器TIM_Cmd(TIM3, ENABLE); //使能TIMx外設}void TIM3_IRQHandler(void) //TIM3中斷{if (TIM_GetITStatus(TIM3, TIM_IT_Update) != RESET) //檢查指定的TIM中斷發生與否:TIM 中斷源{TIM_ClearITPendingBit(TIM3, TIM_IT_Update ); //清除TIMx的中斷待處理位:TIM 中斷源LED1=!LED1;}}//PWM輸出初始化//arr:自動重裝值//psc:時鐘預分頻數void TIM3_PWM_Init(u16 arr,u16 psc){GPIO_InitTypeDef GPIO_InitStructure;TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;TIM_OCInitTypeDef TIM_OCInitStructure;RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM3, ENABLE);RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB | RCC_APB2Periph_AFIO, ENABLE); //使能GPIO外設和AFIO復用功能模塊時鐘使能GPIO_PinRemapConfig(GPIO_PartialRemap_TIM3, ENABLE); //Timer3部分重映射 TIM3_CH2->PB5 //用于TIM3的CH2輸出的PWM通過該LED顯示//設置該引腳為復用輸出功能,輸出TIM3 CH2的PWM脈沖波形GPIO_InitStructure.GPIO_Pin = GPIO_Pin_5; //TIM_CH2GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF_PP; //復用推挽輸出GPIO_InitStructure.GPIO_Speed = GPIO_Speed_50MHz;GPIO_Init(GPIOB, &GPIO_InitStructure);//GPIO_WriteBit(GPIOA, GPIO_Pin_7,Bit_SET); // PA7上拉TIM_TimeBaseStructure.TIM_Period = arr; //設置在下一個更新事件裝入活動的自動重裝載寄存器周期的值 80KTIM_TimeBaseStructure.TIM_Prescaler =psc; //設置用來作為TIMx時鐘頻率除數的預分頻值 不分頻TIM_TimeBaseStructure.TIM_ClockDivision = 0; //設置時鐘分割:TDTS = Tck_timTIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上計數模式TIM_TimeBaseInit(TIM3, &TIM_TimeBaseStructure); //根據TIM_TimeBaseInitStruct中指定的參數初始化TIMx的時間基數單位TIM_OCInitStructure.TIM_OCMode = TIM_OCMode_PWM2; //選擇定時器模式:TIM脈沖寬度調制模式2TIM_OCInitStructure.TIM_OutputState = TIM_OutputState_Enable; //比較輸出使能TIM_OCInitStructure.TIM_Pulse = 0; //設置待裝入捕獲比較寄存器的脈沖值TIM_OCInitStructure.TIM_OCPolarity = TIM_OCPolarity_High; //輸出極性:TIM輸出比較極性高TIM_OC2Init(TIM3, &TIM_OCInitStructure); //根據TIM_OCInitStruct中指定的參數初始化外設TIMxTIM_OC2PreloadConfig(TIM3, TIM_OCPreload_Enable); //使能TIMx在CCR2上的預裝載寄存器TIM_ARRPreloadConfig(TIM3, ENABLE); //使能TIMx在ARR上的預裝載寄存器TIM_Cmd(TIM3, ENABLE); //使能TIMx外設}//定時器5通道1輸入捕獲配置TIM_ICInitTypeDef TIM5_ICInitStructure;void TIM5_Cap_Init(u16 arr,u16 psc){GPIO_InitTypeDef GPIO_InitStructure;TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;NVIC_InitTypeDef NVIC_InitStructure;RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM5, ENABLE); //使能TIM5時鐘RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE); //使能GPIOA時鐘GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0; //PA0 清除之前設置GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IPD; //PA0 輸入GPIO_Init(GPIOA, &GPIO_InitStructure);GPIO_ResetBits(GPIOA,GPIO_Pin_0); //PA0 下拉//初始化定時器5 TIM5TIM_TimeBaseStructure.TIM_Period = arr; //設定計數器自動重裝值TIM_TimeBaseStructure.TIM_Prescaler =psc; //預分頻器TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1; //設置時鐘分割:TDTS = Tck_timTIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up; //TIM向上計數模式TIM_TimeBaseInit(TIM5, &TIM_TimeBaseStructure); //根據TIM_TimeBaseInitStruct中指定的參數初始化TIMx的時間基數單位//初始化TIM5輸入捕獲參數TIM5_ICInitStructure.TIM_Channel = TIM_Channel_1; //CC1S=01 選擇輸入端 IC1映射到TI1上TIM5_ICInitStructure.TIM_ICPolarity = TIM_ICPolarity_Rising; //上升沿捕獲TIM5_ICInitStructure.TIM_ICSelection = TIM_ICSelection_DirectTI; //映射到TI1上TIM5_ICInitStructure.TIM_ICPrescaler = TIM_ICPSC_DIV1; //配置輸入分頻,不分頻TIM5_ICInitStructure.TIM_ICFilter = 0x00;//IC1F=0000 配置輸入濾波器 不濾波TIM_ICInit(TIM5, &TIM5_ICInitStructure);//中斷分組初始化NVIC_InitStructure.NVIC_IRQChannel = TIM5_IRQn; //TIM3中斷NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 2; //先占優先級2級NVIC_InitStructure.NVIC_IRQChannelSubPriority = 0; //從優先級0級NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE; //IRQ通道被使能NVIC_Init(&NVIC_InitStructure); //根據NVIC_InitStruct中指定的參數初始化外設NVIC寄存器TIM_ITConfig(TIM5,TIM_IT_Update|TIM_IT_CC1,ENABLE);//允許更新中斷 ,允許CC1IE捕獲中斷TIM_Cmd(TIM5,ENABLE ); //使能定時器5}u8 TIM5CH1_CAPTURE_STA=0; //輸入捕獲狀態u16 TIM5CH1_CAPTURE_VAL; //輸入捕獲值//定時器5中斷服務程序void TIM5_IRQHandler(void){if((TIM5CH1_CAPTURE_STA&0X80)==0)//還未成功捕獲{if (TIM_GetITStatus(TIM5, TIM_IT_Update) != RESET){if(TIM5CH1_CAPTURE_STA&0X40)//已經捕獲到高電平了{if((TIM5CH1_CAPTURE_STA&0X3F)==0X3F)//高電平太長了{TIM5CH1_CAPTURE_STA|=0X80;//標記成功捕獲了一次TIM5CH1_CAPTURE_VAL=0XFFFF;}else TIM5CH1_CAPTURE_STA++;}}if (TIM_GetITStatus(TIM5, TIM_IT_CC1) != RESET)//捕獲1發生捕獲事件{if(TIM5CH1_CAPTURE_STA&0X40) //捕獲到一個下降沿{TIM5CH1_CAPTURE_STA|=0X80; //標記成功捕獲到一次高電平脈寬TIM5CH1_CAPTURE_VAL=TIM_GetCapture1(TIM5);TIM_OC1PolarityConfig(TIM5,TIM_ICPolarity_Rising); //CC1P=0 設置為上升沿捕獲}else //還未開始,第一次捕獲上升沿{TIM5CH1_CAPTURE_STA=0; //清空TIM5CH1_CAPTURE_VAL=0;TIM_SetCounter(TIM5,0);TIM5CH1_CAPTURE_STA|=0X40; //標記捕獲到了上升沿TIM_OC1PolarityConfig(TIM5,TIM_ICPolarity_Falling); //CC1P=1 設置為下降沿捕獲}}}TIM_ClearITPendingBit(TIM5, TIM_IT_CC1|TIM_IT_Update); //清除中斷標志位}
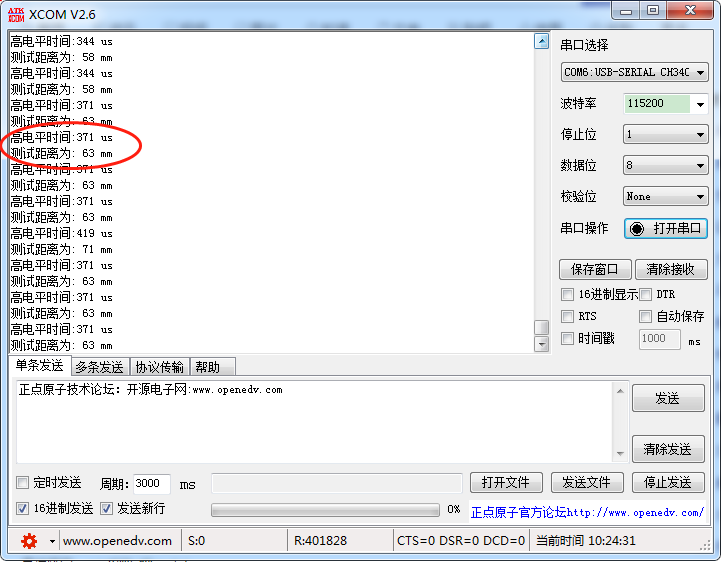
4.2串口顯示結果
 ?
? 
PS:附件是我在網上找的一個HC-SR04模塊的資料,可以參考,但我看了下好像和我手上這個有點兒不一樣,但引腳定義是一樣的,不影響整體設計思路,可以看看。
本文系21ic論壇網友王小琪原創

免責聲明:本文內容由21ic獲得授權后發布,版權歸原作者所有,本平臺僅提供信息存儲服務。文章僅代表作者個人觀點,不代表本平臺立場,如有問題,請聯系我們,謝謝!


