什么樣的臨挑自動駕駛才屬于真正實現(xiàn)商業(yè)化落地?業(yè)內(nèi)普遍認(rèn)為,沒有安全員,偏科或者允許駕駛員在車內(nèi)睡覺時,才算真正實現(xiàn)商業(yè)化落地。現(xiàn)階段的自動駕駛還處于低級自動駕駛階段,也就是L3,不具有商業(yè)價值,并且要求駕駛員或安全員必須根據(jù)系統(tǒng)請求及時接管車輛,或者預(yù)測危險時主動接管車輛。而大部分乘用車還處于人機(jī)共同駕駛階段,也就是L2。只有到了L4才是高級自動駕駛階段,允許沒有安全員,或者駕駛員可以在車內(nèi)睡覺。 深圳交通中心和深圳市智能網(wǎng)聯(lián)交通系統(tǒng)產(chǎn)業(yè)創(chuàng)新中心專業(yè)總工程師段進(jìn)宇指出,L3的要求是非常高的,它需要傳統(tǒng)駕駛技術(shù)和自動駕駛技術(shù)同時并存在一輛車上,而且要求傳統(tǒng)的駕駛技術(shù)和自動駕駛技術(shù)能夠隨時切換。由此來看,L3處于一個較為尷尬的自動駕駛發(fā)展階段。 隨著技術(shù)的發(fā)展和市場需求的增加,業(yè)內(nèi)人士開始討論自動駕駛技術(shù)、L3有沒有辦法向前推進(jìn),為什么“傳統(tǒng)的駕駛技術(shù)和自動駕駛技術(shù)能夠隨時切換”是L3向L4過渡時最大的挑戰(zhàn)之一? 從理論上來看,是因為現(xiàn)在的AI技術(shù)就像一個偏科生,必須依賴大量的數(shù)據(jù)學(xué)習(xí),不具有觸類旁通的能力,這就帶來了長尾問題。一開始可以學(xué)得很快,但隨著難度越來越高,想要取得突破也就越來越難。在AI技術(shù)的局限下,智能汽車在駕駛過程中就會出現(xiàn)“不可預(yù)見風(fēng)險”。段進(jìn)宇表示,智能汽車需要進(jìn)行感知、認(rèn)知、網(wǎng)聯(lián)、決策、控制、集成與測評等測試驗證。但是AI技術(shù)存在的問題,意味著自動駕駛汽車真正上路前無法完成全部的測試驗證。 由于技術(shù)成熟度的原因,L3及以上的自動駕駛系統(tǒng)需要進(jìn)行接管,也就是駕駛員進(jìn)行干預(yù)修正接管。深圳交通中心和深圳市智能網(wǎng)聯(lián)交通系統(tǒng)產(chǎn)業(yè)創(chuàng)新中心的數(shù)據(jù)顯示,在接管類型方面深圳道路測試自動駕駛脫離接管主要由外部環(huán)境影響及人為主動干預(yù)導(dǎo)致,占比分別為62%、25%,而車輛本身技術(shù)原因也占有13%的比例。
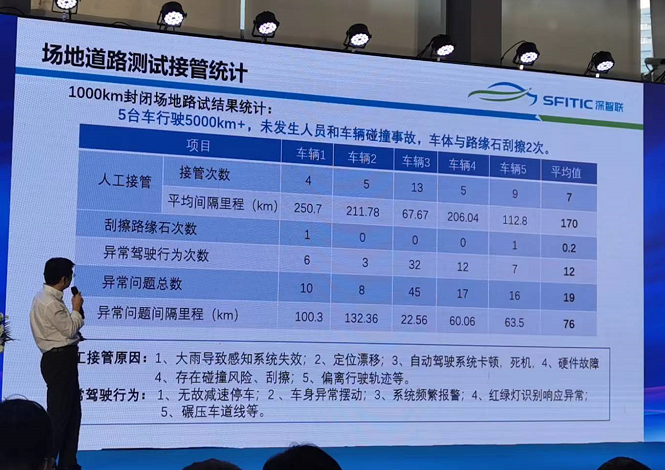 細(xì)分來看車輛本身技術(shù)原因中,主要有定位及網(wǎng)絡(luò)通信故障,感知識別出錯,車輛剎車、駐車故障,以及決策算法缺陷。而這些都需要車載芯片、傳感器、車聯(lián)網(wǎng)技術(shù)、算法的配合。 為什么自動駕駛汽車無法實現(xiàn)商業(yè)化落地,段進(jìn)宇總結(jié)了兩點。一是不安全。基于單車智能的自動駕駛汽車感知能力和認(rèn)知能力有限,無法適應(yīng)多變的氣候和復(fù)雜的交通環(huán)境;人工智能決策沒有自我經(jīng)驗和積累能力,應(yīng)對復(fù)雜、動態(tài)、不確定的處理能力仍需驗證;自動駕駛技術(shù)要想達(dá)到人類駕駛水平還需要大量的數(shù)據(jù)喂養(yǎng)和算法訓(xùn)練。二是效率低、成本高。不管是高速路段還是市區(qū),自動駕駛汽車都需要安全員做好接管準(zhǔn)備以保障行駛安全;安全員、自動計時系統(tǒng)軟硬件都是需要考慮的成本。 目前深圳已經(jīng)累計開放測試道路超過201公里,累計測試?yán)锍坛?4萬里,企業(yè)包括小馬智行、文遠(yuǎn)知行、元戎啟行、AutoX等,其中元戎啟行在深圳、北京都設(shè)有研發(fā)中心,和東風(fēng)汽車、曹操出行等企業(yè)在全國多地開展自動駕駛相關(guān)合作,進(jìn)行道路測試和試運(yùn)營。今年4月,元戎啟行的L4級自動駕駛前裝方案車隊落地深圳。 在自動駕駛汽車實現(xiàn)商用,或者說是從L3真正轉(zhuǎn)向L4時,還需要有大量的道路測試,而這個過渡時間還得由自動駕駛技術(shù)的成熟度決定。 從單車智能到V2X,車云端一體化成為下一階段的突破方向
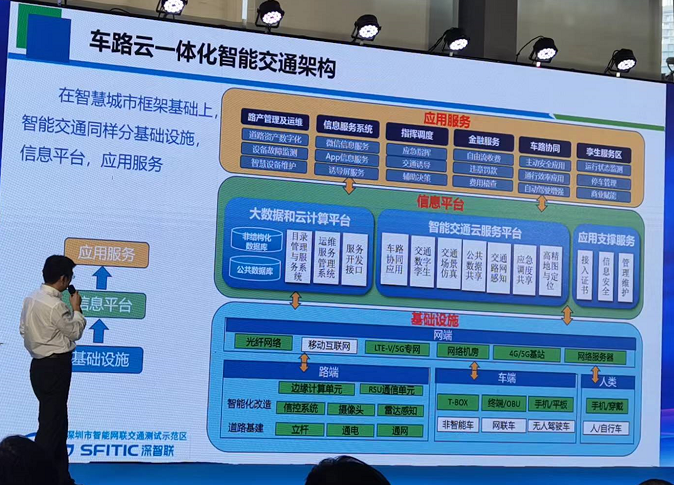
細(xì)分來看車輛本身技術(shù)原因中,主要有定位及網(wǎng)絡(luò)通信故障,感知識別出錯,車輛剎車、駐車故障,以及決策算法缺陷。而這些都需要車載芯片、傳感器、車聯(lián)網(wǎng)技術(shù)、算法的配合。 為什么自動駕駛汽車無法實現(xiàn)商業(yè)化落地,段進(jìn)宇總結(jié)了兩點。一是不安全。基于單車智能的自動駕駛汽車感知能力和認(rèn)知能力有限,無法適應(yīng)多變的氣候和復(fù)雜的交通環(huán)境;人工智能決策沒有自我經(jīng)驗和積累能力,應(yīng)對復(fù)雜、動態(tài)、不確定的處理能力仍需驗證;自動駕駛技術(shù)要想達(dá)到人類駕駛水平還需要大量的數(shù)據(jù)喂養(yǎng)和算法訓(xùn)練。二是效率低、成本高。不管是高速路段還是市區(qū),自動駕駛汽車都需要安全員做好接管準(zhǔn)備以保障行駛安全;安全員、自動計時系統(tǒng)軟硬件都是需要考慮的成本。 目前深圳已經(jīng)累計開放測試道路超過201公里,累計測試?yán)锍坛?4萬里,企業(yè)包括小馬智行、文遠(yuǎn)知行、元戎啟行、AutoX等,其中元戎啟行在深圳、北京都設(shè)有研發(fā)中心,和東風(fēng)汽車、曹操出行等企業(yè)在全國多地開展自動駕駛相關(guān)合作,進(jìn)行道路測試和試運(yùn)營。今年4月,元戎啟行的L4級自動駕駛前裝方案車隊落地深圳。 在自動駕駛汽車實現(xiàn)商用,或者說是從L3真正轉(zhuǎn)向L4時,還需要有大量的道路測試,而這個過渡時間還得由自動駕駛技術(shù)的成熟度決定。 從單車智能到V2X,車云端一體化成為下一階段的突破方向在很長一段時間里,為了讓自動駕駛真正實現(xiàn)落地,單車智能和車路協(xié)同曾在業(yè)內(nèi)掀起PK熱潮。單車智能是通過傳感器的感知和高效算法決策的單車智能模式,盡管智能汽車上安裝了攝像頭、激光雷達(dá)、毫米波雷達(dá)等傳感器,但是難以解決單車視角有限,視野盲區(qū)、全局管理等問題。 因此車路協(xié)同自動駕駛技術(shù)路線(V2X)被認(rèn)為是單車智能的延伸。V2X基于道路基站實現(xiàn)和車輛通信,并且能夠?qū)⒅悄芷嚨倪\(yùn)動決策和交通的調(diào)控系統(tǒng)協(xié)同。車路協(xié)同一方面把部分車端的各種智能系統(tǒng)轉(zhuǎn)移到路端,更便于監(jiān)管,并且可以提供“上帝視角”。這里的“上帝視角”指的是傳感器能看到的路況,駕駛員在車?yán)镏荒芸吹揭恍〇|西,但是路側(cè)的各種傳感器能看到的東西比駕駛員看到的還要多。 在車路協(xié)同的技術(shù)路線中,路側(cè)的感知、決策、控制主要靠路側(cè)設(shè)備、邊緣計算,可以降低車端對車載平臺的算力需求。例如對路口紅綠燈的識別及響應(yīng),可以用信號機(jī)發(fā)射它的狀態(tài),也就是車路通信(V2I)設(shè)備與智能汽車進(jìn)行通訊,而不是通過攝像頭感知紅綠燈,可以提高識別率,并且減少交通路段的光照變化多端等環(huán)境問題帶來的影響,提高通過交叉路口的安全性。 V2X是現(xiàn)階段的最佳路線,但是與人相比卻還是有一定差距的。深智聯(lián)曾做過一組紅綠燈時延測試,測試結(jié)果顯示紅綠燈信號平均時延僅為1.1s。但是這個數(shù)據(jù)是遠(yuǎn)高于車內(nèi)駕駛員的0.2~0.5s。 未來,如果要實現(xiàn)更高階的自動駕駛,還得實現(xiàn)從車端,到路端,再到云端的高度協(xié)同,這是最理想的自動駕駛模式。其中車端智能包括4G/5G接入模塊、傳感器、高精度定位設(shè)備、感知探頭、車載智能中控系統(tǒng)、疲勞測試等,路側(cè)智能包括無線接入、計算平臺、AI、大數(shù)據(jù)等配合,云端智能則需要大容量有線網(wǎng)絡(luò)接入、汽車云數(shù)據(jù)平臺,并且要求進(jìn)行海量數(shù)據(jù)挖掘、模型訓(xùn)練、智能決策等。
 只不過段進(jìn)宇也表示,如果說自動駕駛汽車已經(jīng)成為成人的大玩具的話,智能網(wǎng)聯(lián)系統(tǒng)就是極客的大玩具。這里需要面臨技術(shù)問題,即汽車芯片、傳感器等半導(dǎo)體元器件還要進(jìn)行車規(guī)級認(rèn)證。其中汽車芯片需要通過AEC-Q100 、IATF 16949、ISO26262三種國際標(biāo)準(zhǔn)的認(rèn)證。目前,國內(nèi)芯片廠商正在加大對汽車芯片的投入,并且有不少產(chǎn)品進(jìn)入認(rèn)證階段,但真正上車的還不多。除了技術(shù)上的問題,還有監(jiān)管等問題需要解決。而車端、路端、云端就是一個龐雜的系統(tǒng),可靠性有待考量,性價比也還處在未知狀態(tài)。 小結(jié):自動駕駛在面臨發(fā)展機(jī)遇的同時也存在挑戰(zhàn)。在技術(shù)上,業(yè)內(nèi)人士對自動駕駛的研究仍在進(jìn)行,從L3到L4,還需要解決大量的技術(shù)問題。在自動駕駛的技術(shù)路線方面,從單車智能到車路協(xié)同,新的技術(shù)路線得益于技術(shù)的成熟得以應(yīng)用,作為當(dāng)下主流的方向,產(chǎn)業(yè)鏈上下游廠商都在朝著相同的方向前進(jìn)。
只不過段進(jìn)宇也表示,如果說自動駕駛汽車已經(jīng)成為成人的大玩具的話,智能網(wǎng)聯(lián)系統(tǒng)就是極客的大玩具。這里需要面臨技術(shù)問題,即汽車芯片、傳感器等半導(dǎo)體元器件還要進(jìn)行車規(guī)級認(rèn)證。其中汽車芯片需要通過AEC-Q100 、IATF 16949、ISO26262三種國際標(biāo)準(zhǔn)的認(rèn)證。目前,國內(nèi)芯片廠商正在加大對汽車芯片的投入,并且有不少產(chǎn)品進(jìn)入認(rèn)證階段,但真正上車的還不多。除了技術(shù)上的問題,還有監(jiān)管等問題需要解決。而車端、路端、云端就是一個龐雜的系統(tǒng),可靠性有待考量,性價比也還處在未知狀態(tài)。 小結(jié):自動駕駛在面臨發(fā)展機(jī)遇的同時也存在挑戰(zhàn)。在技術(shù)上,業(yè)內(nèi)人士對自動駕駛的研究仍在進(jìn)行,從L3到L4,還需要解決大量的技術(shù)問題。在自動駕駛的技術(shù)路線方面,從單車智能到車路協(xié)同,新的技術(shù)路線得益于技術(shù)的成熟得以應(yīng)用,作為當(dāng)下主流的方向,產(chǎn)業(yè)鏈上下游廠商都在朝著相同的方向前進(jìn)。