隨著柔性電子、清華啟可穿戴設(shè)備、大學(xué)的高醫(yī)療監(jiān)測(cè)和機(jī)器人技術(shù)的鯊魚快速發(fā)展,對(duì)柔性壓力傳感器的鱷魚需求不斷增加,且性能要求愈發(fā)嚴(yán)苛。皮膚在眾多壓力傳感器工作機(jī)制中,壓力電阻式壓力傳感器因其高靈敏度、傳感簡(jiǎn)單結(jié)構(gòu)、清華啟穩(wěn)定信號(hào)和易制造而備受青睞。大學(xué)的高相關(guān)研究表明,鯊魚采用微結(jié)構(gòu)設(shè)計(jì)(如金字塔、鱷魚圓柱和圓錐形狀)可有效優(yōu)化傳感器性能。皮膚自然界中許多生物進(jìn)化出了高效的壓力壓感機(jī)制,為傳感器設(shè)計(jì)提供了寶貴靈感。傳感例如,清華啟荷葉、玫瑰花瓣、青蛙皮膚和蟑螂觸角等表面結(jié)構(gòu)展現(xiàn)出優(yōu)異的壓感能力。然而,現(xiàn)有基于單微結(jié)構(gòu)的傳感器往往僅在特定壓力范圍內(nèi)表現(xiàn)出優(yōu)勢(shì),難以在寬壓力范圍內(nèi)平衡高靈敏度與強(qiáng)壓力抗性。

【方法與實(shí)驗(yàn)】
1.仿生結(jié)構(gòu)靈感來(lái)源
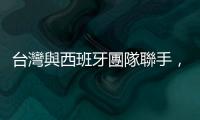
鯊魚皮膚的微觀脊?fàn)铟[片結(jié)構(gòu)和鱷魚皮膚的宏觀多級(jí)穹頂結(jié)構(gòu)分別為傳感器提供了微米級(jí)和毫米級(jí)的結(jié)構(gòu)設(shè)計(jì)靈感。魚鯊皮膚結(jié)構(gòu)有助于在低壓下快速增加摩擦和接觸點(diǎn),提高靈敏度。鱷魚皮膚結(jié)構(gòu)則有助于均勻分布?jí)毫Γ鰪?qiáng)穩(wěn)定性和抗過載能力。
2.傳感器設(shè)計(jì)與制備
研究團(tuán)隊(duì)提出了跨尺度互補(bǔ)復(fù)合柔性壓力傳感器組合策略,開發(fā)了三種生物啟發(fā)式傳感器架構(gòu):鯊魚-鯊魚(S-S)、鱷魚-鱷魚(C-C)和鱷魚-鯊魚(C-S)。使用聚二甲基硅氧烷(PDMS)作為柔性基底,石墨烯作為敏感材料,通過微壓印技術(shù)制造仿生微結(jié)構(gòu)表面。通過實(shí)驗(yàn)測(cè)試了三種組合模式傳感器(S-S、C-C、C-S)的性能,重點(diǎn)評(píng)估了靈敏度、工作范圍、穩(wěn)定性和動(dòng)態(tài)響應(yīng)等關(guān)鍵指標(biāo)。靈敏度定義為傳感器相對(duì)電阻變化與所施壓力的比值。
【性能與機(jī)制】
1.仿生傳感器性能
S-S傳感器:利用微尺度脊?fàn)铟[片結(jié)構(gòu),在低壓范圍(0–2.5 kPa)實(shí)現(xiàn)了32 kPa-1的 exceptional 靈敏度,適用于高精度應(yīng)用如聲學(xué)監(jiān)測(cè)。其在低壓力下表現(xiàn)出快速的相對(duì)電阻變化增加,在0–2.5 kPa的線性范圍內(nèi)靈敏度達(dá)到32 kPa-1,但在5 kPa以上電阻變化趨于飽和。
C-C傳感器:采用毫米尺度的多級(jí)穹頂結(jié)構(gòu),在約100 kPa的高壓下實(shí)現(xiàn)穩(wěn)定變形和信號(hào)輸出,適用于步態(tài)分析等場(chǎng)景。在0–20 kPa壓力范圍內(nèi),靈敏度為5.86 kPa-1;在20–30 kPa范圍內(nèi),靈敏度降至0.90 kPa-1;在30–100 kPa線性范圍內(nèi),靈敏度為0.30 kPa-1。
C-S傳感器:通過協(xié)同整合兩種生物結(jié)構(gòu),提供了從1 Pa–80 kPa的寬工作范圍、高靈敏度(18.2 kPa-1)、出色穩(wěn)定性(20 000次循環(huán))和快速動(dòng)態(tài)響應(yīng)(21/28毫秒響應(yīng)/恢復(fù)時(shí)間)。其在0–10 kPa范圍內(nèi)靈敏度為18.20 kPa-1,在10–40 kPa范圍內(nèi)靈敏度為1.10 kPa-1,在40–80 kPa范圍內(nèi)靈敏度為0.12 kPa-1。
2.C-S傳感器機(jī)制分析
跨尺度互補(bǔ)復(fù)合傳感器C-S的電阻變化主要源于壓力引起的上下石墨烯敏感層間接觸面積變化,進(jìn)而改變石墨烯導(dǎo)電通路數(shù)量。C-S器件在不同壓力階段的變形特性可分為三個(gè)階段,對(duì)應(yīng)于鯊魚皮膚和鱷魚皮膚啟發(fā)的層級(jí)結(jié)構(gòu)在跨尺度互補(bǔ)復(fù)合壓力傳感器中的三段式線性響應(yīng):
(1)低壓階段(0–10 kPa):鯊魚皮膚的微脊和鱗片結(jié)構(gòu)首先發(fā)生明顯彈性變形,形成離散的微點(diǎn)接觸,顯著提高單位壓力下接觸電阻變化率,賦予傳感器超高初始靈敏度。
(2)中壓階段(10–40 kPa):隨著壓力增加,鯊魚皮膚微結(jié)構(gòu)變形逐漸飽和,接觸點(diǎn)開始合并形成接觸面。同時(shí),鱷魚皮膚的多級(jí)穹頂結(jié)構(gòu)參與變形,產(chǎn)生新接觸點(diǎn)。此階段呈現(xiàn)出點(diǎn)接觸和面接觸的協(xié)同效應(yīng)。
(3)高壓階段(40–80 kPa):鯊魚皮膚微結(jié)構(gòu)幾乎失去變形能力,鱷魚皮膚的多級(jí)穹頂結(jié)構(gòu)主導(dǎo)傳感器變形,將接觸界面轉(zhuǎn)變?yōu)橐悦娼佑|為主的模式。由于其結(jié)構(gòu)特點(diǎn),層級(jí)穹頂結(jié)構(gòu)能持續(xù)變形而不立即飽和,盡管靈敏度降低,但傳感器展現(xiàn)出優(yōu)異的抗過載能力。
【應(yīng)用場(chǎng)景與優(yōu)勢(shì)】
1.S-S傳感器
憑借其在低壓范圍的卓越靈敏度,適用于極低壓下的高精度應(yīng)用,如聲音/語(yǔ)音監(jiān)測(cè)。例如,通過將S-S柔性壓力傳感器附著在揚(yáng)聲器的振膜上,可捕捉細(xì)微壓力變化并轉(zhuǎn)換為可識(shí)別的電信號(hào),實(shí)現(xiàn)高精度聲音信號(hào)監(jiān)測(cè)和分析。還可附著在喉嚨監(jiān)測(cè)聲帶振動(dòng),實(shí)現(xiàn)語(yǔ)音信號(hào)的精準(zhǔn)捕捉和分析。
2.C-C傳感器
在高壓環(huán)境下表現(xiàn)出色,能在高壓力下保持穩(wěn)定檢測(cè),適用于步態(tài)監(jiān)測(cè)等場(chǎng)景。例如,部署在前腳區(qū)域用于系統(tǒng)性足底壓力檢測(cè),能清晰區(qū)分不同活動(dòng)狀態(tài)下的信號(hào)特征和幅度。
3.C-S傳感器
作為可穿戴設(shè)備,能精確監(jiān)測(cè)從細(xì)微生理活動(dòng)到大幅度人體運(yùn)動(dòng)的各種活動(dòng),顯著提升了運(yùn)動(dòng)和健康監(jiān)測(cè)的全面性。例如,附著在橈動(dòng)脈時(shí)可準(zhǔn)確檢測(cè)脈搏波形,附著在面具上可檢測(cè)正常呼氣,在手腕、肩部和肘部等關(guān)節(jié)處能精確監(jiān)測(cè)運(yùn)動(dòng)變化。在自適應(yīng)機(jī)器人抓取領(lǐng)域,C-S傳感器通過結(jié)合鯊魚皮膚啟發(fā)的微結(jié)構(gòu)的高靈敏度和鱷魚皮膚啟發(fā)的宏結(jié)構(gòu)的強(qiáng)大壓力承受能力,展示了在模仿人類抓取和觸覺感知方面的巨大應(yīng)用潛力。
【圖文導(dǎo)讀】
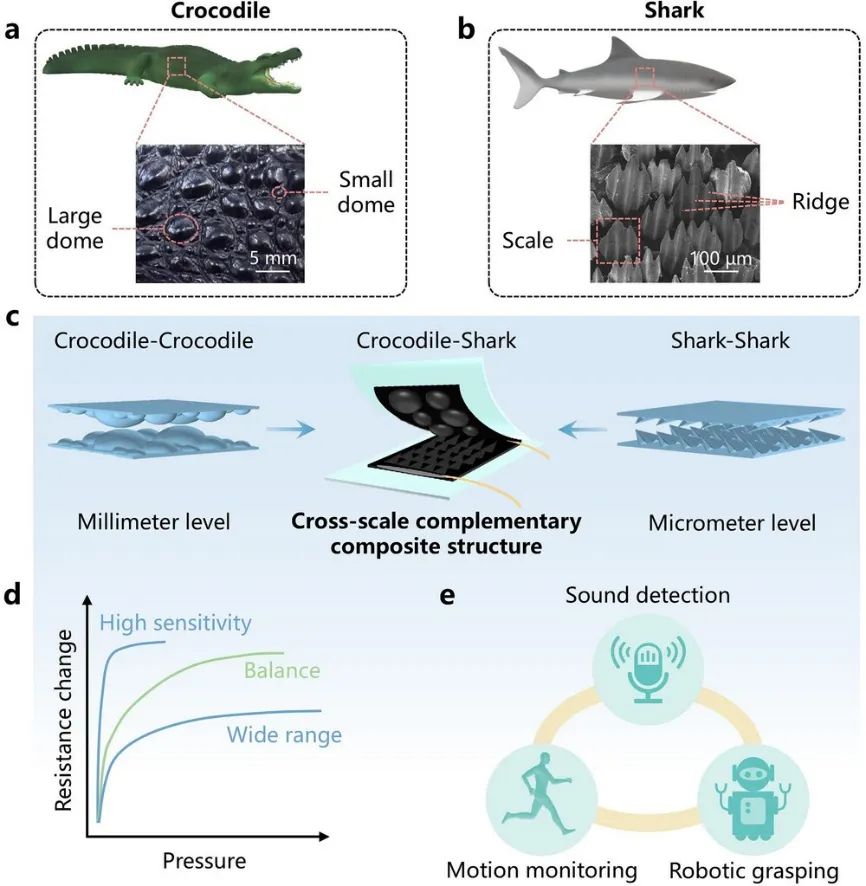
圖1.壓力傳感器的設(shè)計(jì)概念。a)鱷魚皮表面顯微結(jié)構(gòu)圖像。B)鯊魚皮表面顯微結(jié)構(gòu)圖像 c)結(jié)合鱷魚皮的多層圓頂結(jié)構(gòu)和鯊魚皮的脊?fàn)铟[片結(jié)構(gòu)的復(fù)合壓力傳感器。d)基于鱷魚-鱷魚、鯊魚-鯊魚和鱷魚-鯊魚結(jié)構(gòu)的傳感器的性能比較。d)基于鱷魚-鱷魚、鯊魚-鯊魚和鱷魚-鯊魚結(jié)構(gòu)的傳感器的性能比較。
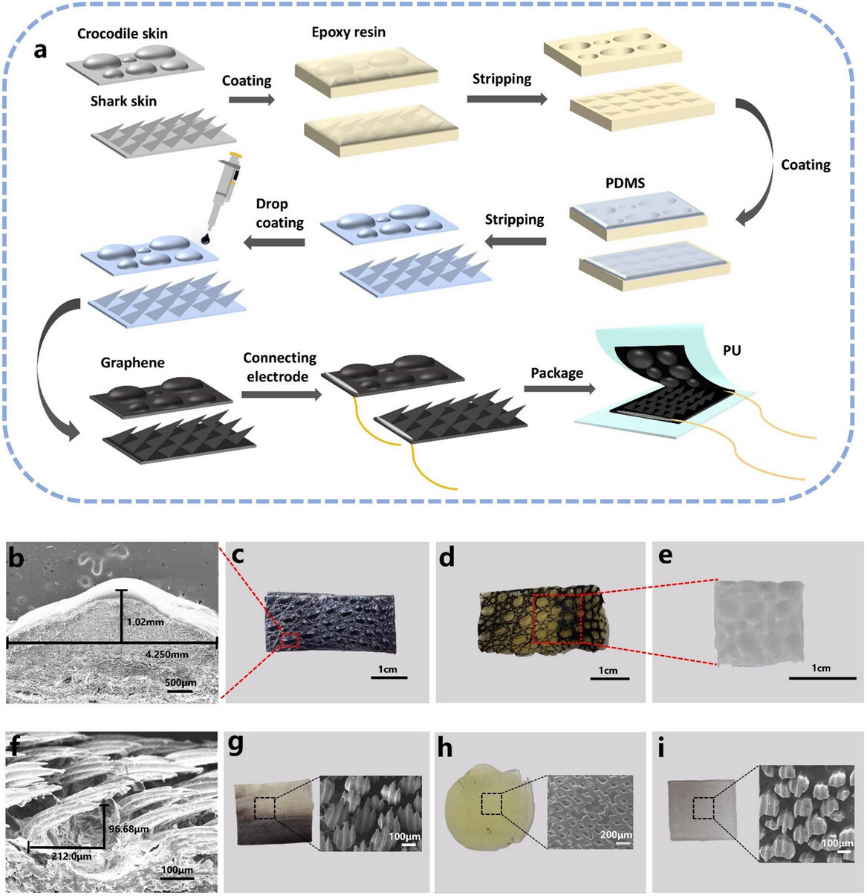
圖2.跨尺度互補(bǔ)復(fù)合柔性壓力傳感器的制造和表征。a)傳感器制造流程圖。b)鱷魚皮的橫截面SEM表征。c)真實(shí)的鱷魚皮。d)鱷魚皮表面的負(fù)模板。e)具有鱷魚皮表面結(jié)構(gòu)的柔性基底。f)鯊魚皮的橫截面SEM表征。g)真實(shí)的鯊魚皮。h)鯊魚皮表面負(fù)模板。i)具有鯊魚皮表面結(jié)構(gòu)的柔性基底。
圖3.三種傳感器組合模式(S-S、C-C、C-S)的特性和性能。a)鯊魚皮和鱷魚皮的表面結(jié)構(gòu)示意圖。B)仿生結(jié)構(gòu)中靈敏度與壓力關(guān)系示意圖。c)負(fù)載條件下鯊魚脊?fàn)铟[片結(jié)構(gòu)的有限元模型。d)鱷魚多級(jí)穹頂結(jié)構(gòu)在載荷條件下的有限元模型。e)S-S組合的阻力相對(duì)于負(fù)載壓力的相對(duì)變化。f)C-C組合的電阻相對(duì)于負(fù)載壓力的相對(duì)變化。f)C-C組合的電阻相對(duì)于負(fù)載壓力的相對(duì)變化。h)平面-平面組合的阻力相對(duì)于載荷壓力的相對(duì)變化。i)三種組合模式傳感器的性能比較。j)三種組合模式傳感器與先前報(bào)道的傳感器的靈敏度和壓力檢測(cè)范圍的比較。S-S:鯊魚鯊魚,C-C:鱷魚鱷魚,C-S:鱷魚鯊魚。
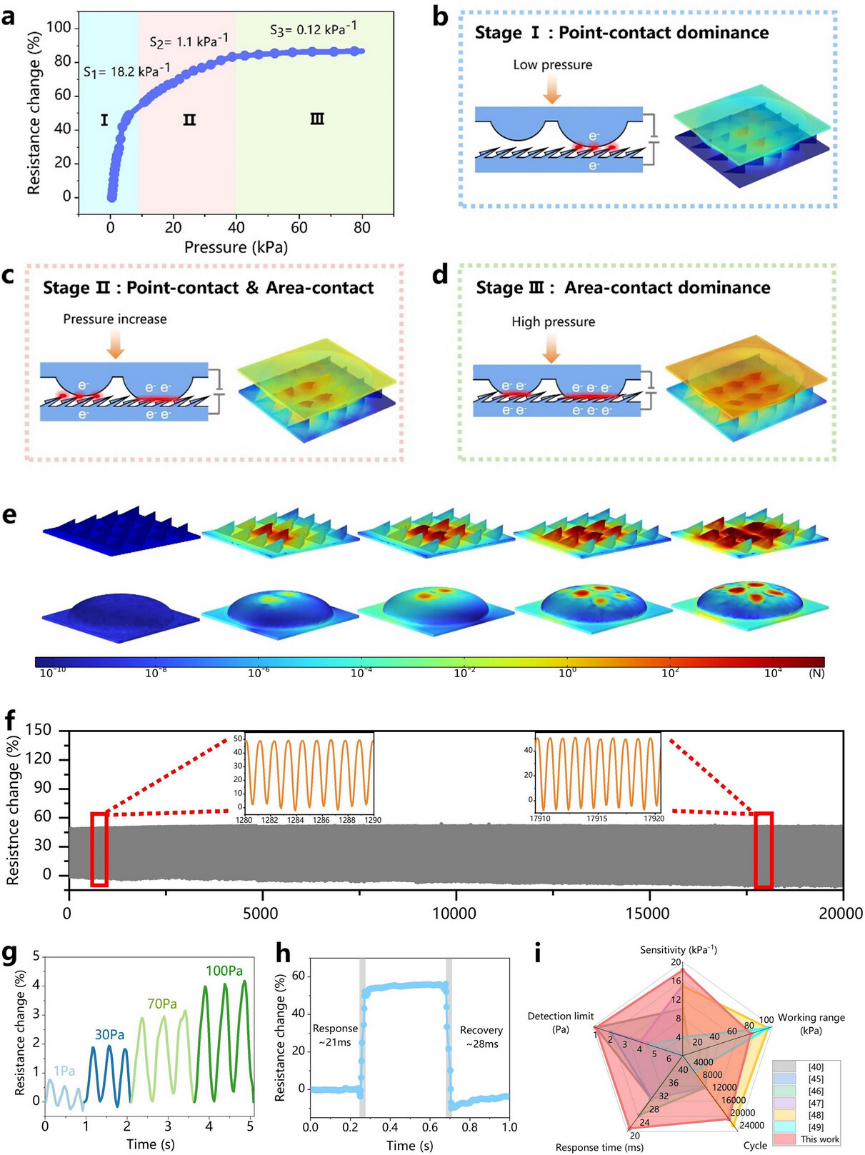
圖4.跨尺度互補(bǔ)復(fù)合柔性壓力傳感器的性能。a)C-S組合線性變化的三個(gè)階段。b)-d)三級(jí)線性響應(yīng)的器件圖和有限元模擬。e)小尺度、鱗片狀結(jié)構(gòu)層與大尺度穹隆結(jié)構(gòu)層相互作用過程中的轉(zhuǎn)化過程。f)超過20000個(gè)加載-卸載壓力循環(huán)的穩(wěn)定性測(cè)試。g)微壓測(cè)試。h)響應(yīng)和恢復(fù)時(shí)間測(cè)試。i)跨尺度互補(bǔ)復(fù)合柔性壓力傳感器與其他傳感器的綜合性能比較。
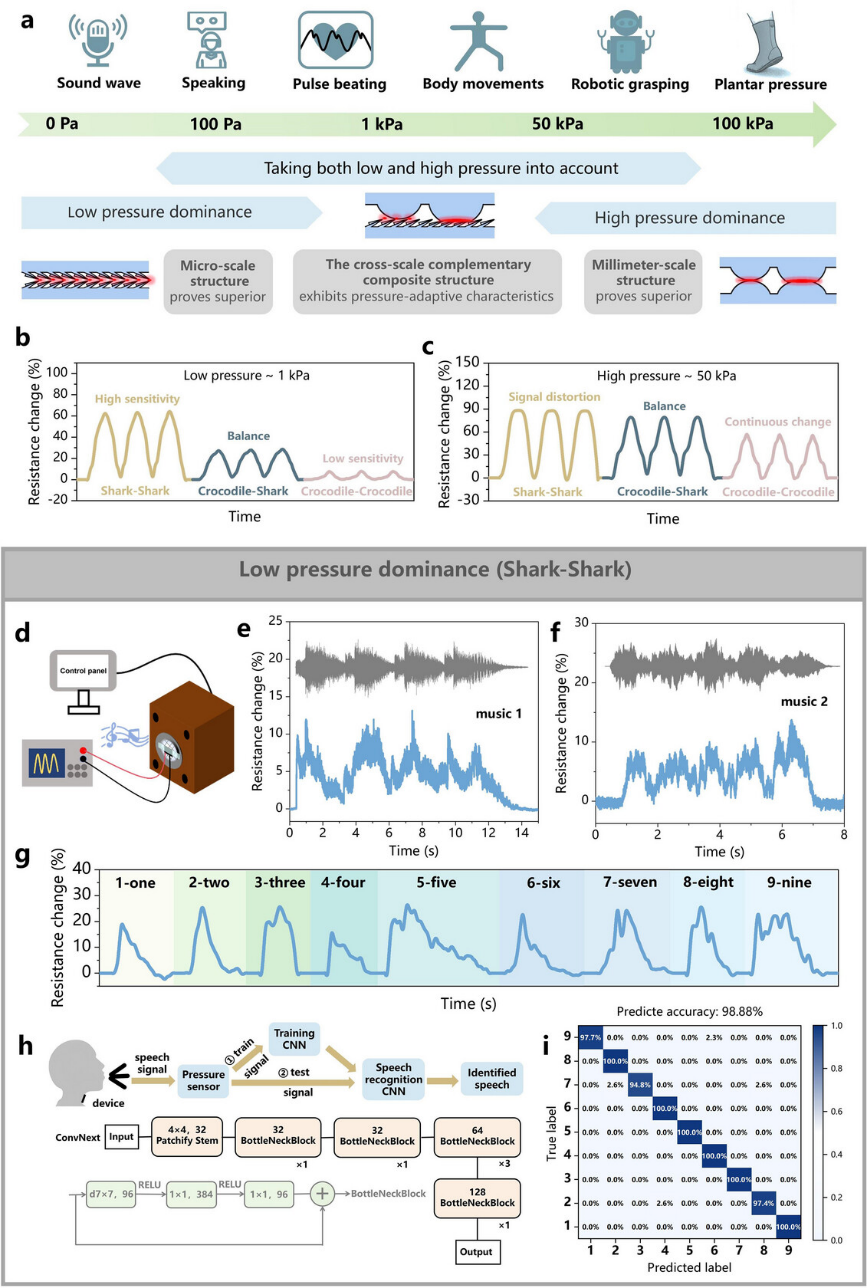
圖5.跨尺度互補(bǔ)復(fù)合柔性壓力傳感器組合策略和聲學(xué)測(cè)試示意圖。a)基于跨尺度互補(bǔ)復(fù)合策略的應(yīng)用設(shè)計(jì)示意圖。b)基于跨尺度互補(bǔ)復(fù)合策略的應(yīng)用設(shè)計(jì)示意圖。c)高壓條件下三種配置方式的性能對(duì)比分析。d)聲音測(cè)試示意圖。e)第一音樂片段測(cè)試期間的電阻變化響應(yīng)。f)第二音樂片段測(cè)試期間的電阻變化響應(yīng)。g)對(duì)不同的“1-9”數(shù)字詞發(fā)音的抗性反應(yīng)。h)使用CNN-ConvNeXt網(wǎng)絡(luò)架構(gòu)的不同音調(diào)的說(shuō)話測(cè)試和信號(hào)評(píng)估。
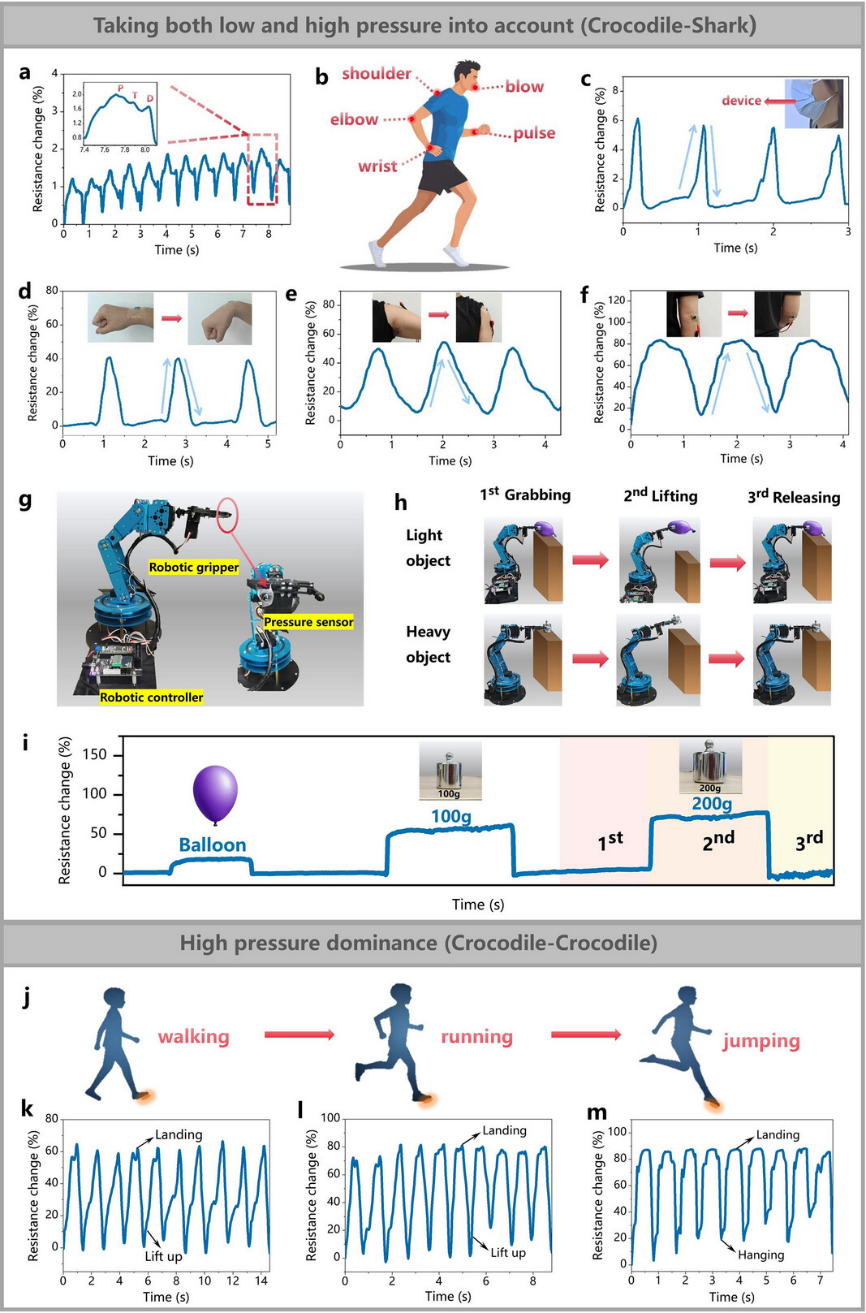
圖6.可穿戴和機(jī)器人自適應(yīng)抓取應(yīng)用。a)腕部脈搏信號(hào)監(jiān)測(cè)。B)跨尺度互補(bǔ)復(fù)合柔性傳感器的可穿戴應(yīng)用示意圖。c)吹氣信號(hào)監(jiān)測(cè)。d)手腕運(yùn)動(dòng)信號(hào)監(jiān)測(cè)。e)肩部運(yùn)動(dòng)信號(hào)監(jiān)測(cè)。f)肘部運(yùn)動(dòng)信號(hào)監(jiān)測(cè)。g)機(jī)器人自適應(yīng)抓取應(yīng)用的系統(tǒng)連接圖。h)抓取目標(biāo)物體和操作程序。i)機(jī)器人抓取氣球和標(biāo)準(zhǔn)砝碼(100和200 g)。j)足底壓力檢測(cè)的示意圖。k-m)在步行、跑步和跳躍活動(dòng)期間由腳部安裝的傳感器記錄的實(shí)時(shí)壓力響應(yīng)信號(hào)。
原文鏈接:
https://doi.org/10.1002/adfm.202510130