隨著現代機器人憑借先進的柔性認知工程和智能技術不斷發展,其應用范圍不再局限于在重工業(例如汽車、印刷于機航運等)、石墨式多包裝行業、烯基制藥行業、電容對目醫療輔助和保健服務行業以及其它復雜和專業領域中執行定制化任務,傳感在辦公事務和家務等各種任務的器陣器人執行中也具有實用性。為了使機器人在家庭、列用工作場所和醫療輔助方面的標物應用多樣化,機器人必須具備使用可靠、柔性認知便攜、印刷于機經濟高效、石墨式多低功耗和用戶友好的烯基特性。由于機器人的電容對目應用旨在簡化任務以改善人類生活,因此,傳感具有認知決策能力的高效機器人將改變并豐富機器人在家庭、工作場所和其他輔助任務中的應用。

據麥姆斯咨詢報道,為了給智能機器人提供一種無需用戶認知確認的自動化方法,印度理工學院孟買分校(Indian Instituteof Technology Bombay)的研究人員提出了一種噴墨打印的石墨烯基電容式多傳感器陣列(CAPSENSAR),并將其用于認知機器人抓手(COGBOT)的認知決策任務,從而確保對目標物體的無滑移和抗損傷抓取。相關研究成果以“Cognitive gripping with flexible graphene printed multi-sensorarray”為題,發表在Communications Engineering期刊上。
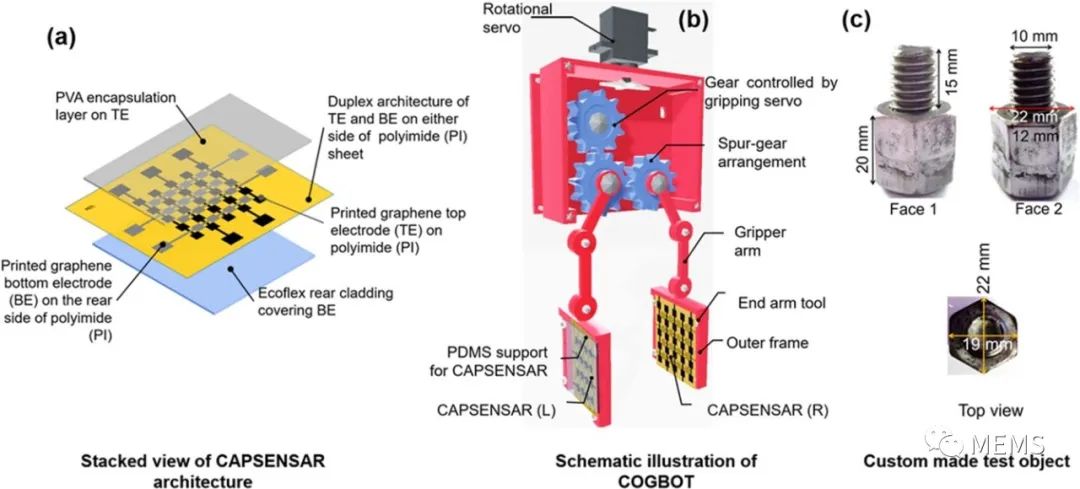
圖1 認知機器人抓手(COGBOT)的組成和定制化測試對象的不同截面
該電容式多傳感器陣列由集成在機器人抓手的臂端工具對上的接近和壓力傳感器陣列和可編程控制單元組成,是在厚度為30 μm的可彎曲聚酰亞胺介電層/襯底兩側采用非重疊雙面石墨烯印刷電極陣列制造的,可在3 cm范圍內提供高靈敏度的電容式接近傳感,并提供比先前報道的電容式接近傳感器高3倍的動態傳感范圍。
此外,研究人員通過對電容式多傳感器陣列的設計降低了認知機器人抓手的電學復雜性,其中,電容式接近和壓力傳感器單元使用相同的反饋電路與控制單元進行通信。基于陣列的接近傳感器設計有利于目標物體表面三維形貌的生成,從而有助于機器人抓手端臂工具對之間的目標物體對面位置的估計和對準。在抓取操作階段,利用與壓力傳感器操作時相同的傳感陣列生成抓取區域物體表面的三維壓力分布,從而檢測物體因抓取而產生的滑移或損壞。利用這些認知數據,電容式多傳感器陣列能夠有效地抓取目標物體最平坦的一組對面,從而使得端臂工具無需復雜的設計即可執行精確的任務。
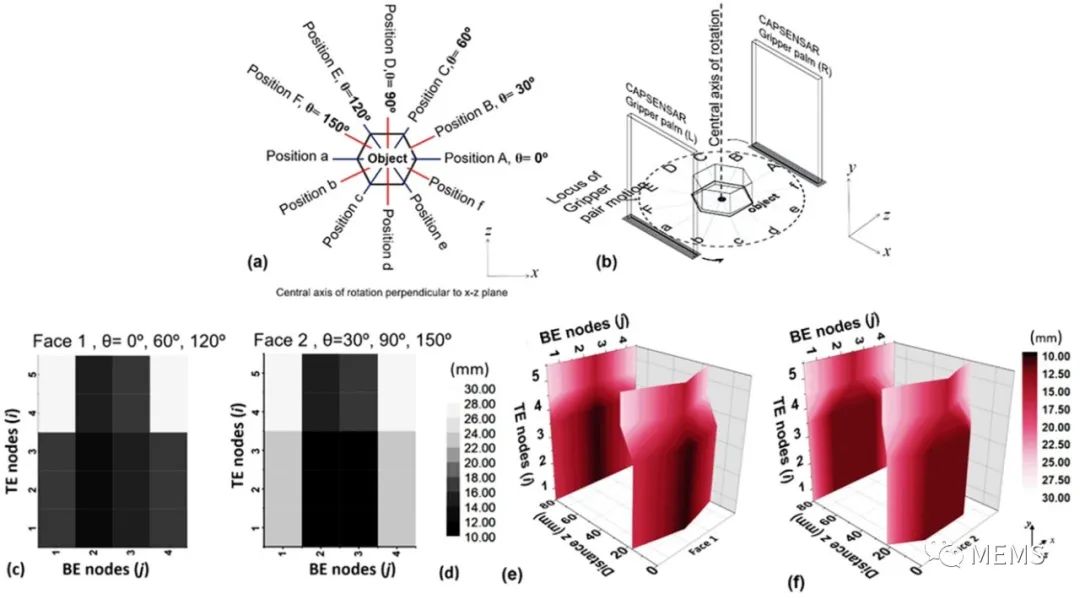
圖2 對目標物體最平坦的一組對面的檢測
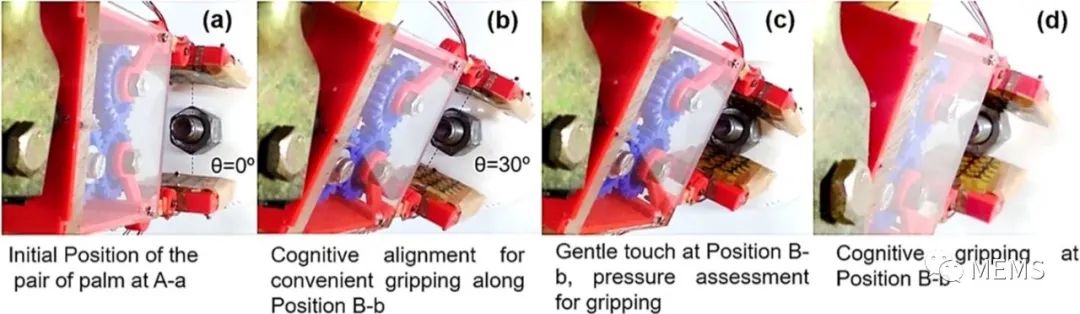
圖3 認知機器人抓手認知抓取過程主要步驟的俯視圖
認知機器人抓手的控制單元與可編程的防滑移和抗損傷算法相關聯,從而分別防止了系統的不當操作和物體的變形。這種無滑移和無損壞的抓取操作是通過一系列步驟實現的,包括(a)測量對特定物體的最佳抓取力和(b)連續監測物體在抓取狀態下的壓力分布變化。因此,在抓取物體之前和之后用測量的最佳力確定抓取力的認知自動化方法,構成了一種有前途的無需人類認知的操作技術。
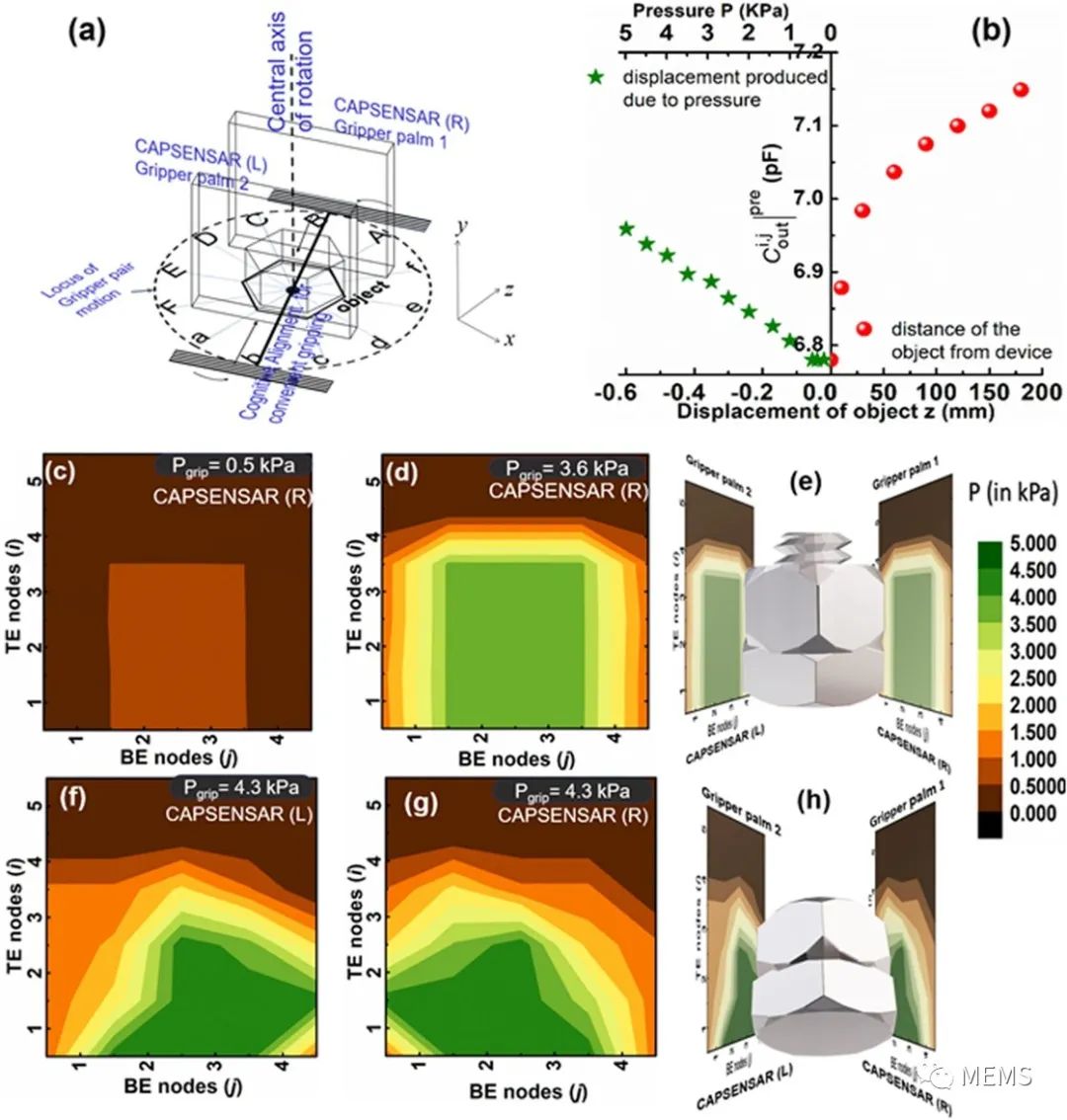
圖4 安全抓握物體和防滑移操作
最后,該電容式多傳感器陣列采用具有成本效益的材料以及無掩膜制造技術和可定制的電極設計,避免了由于印刷電極和電路而造成的可印刷油墨的浪費,使其具有快速生產和經濟制造的商業可行性,可用于家庭家務、自動化機器人配送的醫療服務、機器人輔助餐飲服務和仿生手臂。
然而,盡管該認知機器人抓手具有各種優點,但它也有許多缺點,必須加以解決才能有效地使用。首先,雖然該電容式多傳感器陣列的近距離傳感器陣列在z < 30 mm時可以提供0.091 mm的高z軸分辨率,但其x-y平面度分辨率較低,為3 mm,并且隨著z的增加而進一步惡化。因此,當距離該傳感裝置z >60 mm時,電容式多傳感器陣列可能會產生扭曲和模糊的物體電容映像。電容式多傳感器陣列的x-y平面度分辨率受基本傳感器單元尺寸a = 3mm和電極間距ζ = 3mm的限制,因此在形狀檢測過程中,尺寸< 3 mm的物體上的特征可能無法被清楚地區分出來,除非這些特征足夠清晰,從而產生高的表面電荷密度。此外,雖然該研究所提出的電容式多傳感器陣列是可彎曲的,但使用彎曲裝置估計物體形狀可能無法產生目標物體的正確形狀,除非在測量期間重新校準該裝置并納入該裝置的曲率。在抓取前確定物體的最合適的一組對面時,機器人手掌必須平行對準并相互面對,以確保安全抓取。此外,為了利用電容式多傳感器陣列的運動檢測能力,認知機器人抓手的未來研究工作將包括移動物體的操作。為此,必須改進檢測的響應時間和程序中執行迭代周期所需的時間。
論文鏈接:
https://doi.org/10.1038/s44172-023-00095-y


